- Главная
- Форум
- Микроконтроллеры и Системы на Модуле (SOM)
- Микроконтроллеры Nuvoton на ядре ARM9
- NUC98R
- NUC98R. Установка драйвера USB. Настройка связи по COM/UART.
- Форум
- Микроконтроллеры и Системы на Модуле (SOM)
- Микроконтроллеры Nuvoton на ядре ARM9
- NUC98R
- NUC98R. Установка драйвера USB. Настройка связи по COM/UART.
NUC98R. Установка драйвера USB. Настройка связи по COM/UART.
4 года 8 мес. назад - 3 года 4 мес. назад #6367
от AEfimov
Теперь, наконец, давайте подключим наше устройство к компьютеру, установим для него драйвера и настроим с ним связь по COM/UART.
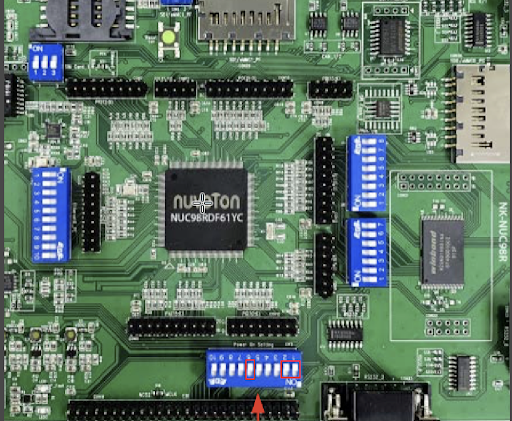
В первую очередь необходимо выбрать режим загрузки USB ISP, для этого на блоке Power On Setting (маркировка на SW2) выставляем 1, 2 и 6 джамперы в положение HIGH (см. рис. 1), на блоках SW3/SW4 устанавливаем все джамперы также в положение HIGH (Режим поддержки NAND-flash)
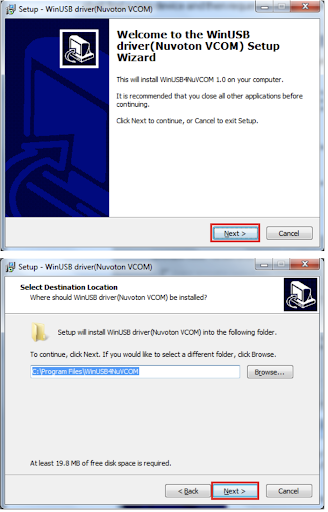
Для установки драйвера NuWriter запустите установочный файл WinUSB4NuVCOM.exe, находящийся в папке “Tools” директории BSP-архива NUC98R.tar. который можно скачать по ссылке:
www.nuvoton.com/resource-download.jsp?tp...D=SW1820200909165814
После запуска включите Контроллер и подключите устройство к компьютеру по Micro-USB порту. Операционная система обнаружит новое устройство и предложит установить для него драйвер:
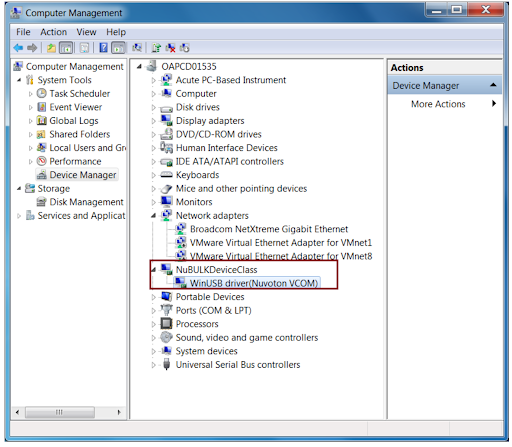
После завершения установки контроллер должен появиться в Диспетчере устройств как USB-device.
После того как драйвер установлен, подключите Устройство к компьютеру по COM-порту (RS232) напрямую, либо используя USB-COM адаптер. Также есть возможность первичного подключения при помощи USB/UART адаптеров - на плату выведены RX/TX/GND каналы отладочного UART0 в виде гнезд для подключения 3-PIN интерфейса.
В диспетчере устройств должен отобразиться активный COM-порт:

Настроим связь с Контроллером через Терминальную программу (В нашем случае используется SecureCRT, но вы можете воспользоваться любым другим удобным аналогом):

(рис. 5)
Перезагрузите Контроллер (Кнопка сброса на плате имеет маркировку SW1)
После перезагрузки в окне Терминала должно появиться инициализационное сообщение (см. рис. 6)
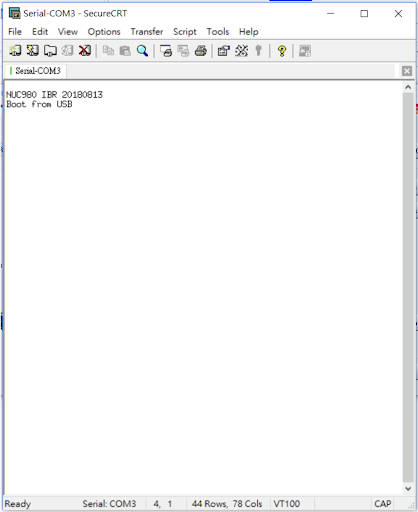
(рис. 6)
Теперь контроллер подключен к ПК и готов к загрузке подготовленных нами ранее образов загрузчика, ядра и файловой системы.
В первую очередь необходимо выбрать режим загрузки USB ISP, для этого на блоке Power On Setting (маркировка на SW2) выставляем 1, 2 и 6 джамперы в положение HIGH (см. рис. 1), на блоках SW3/SW4 устанавливаем все джамперы также в положение HIGH (Режим поддержки NAND-flash)
Для установки драйвера NuWriter запустите установочный файл WinUSB4NuVCOM.exe, находящийся в папке “Tools” директории BSP-архива NUC98R.tar. который можно скачать по ссылке:
www.nuvoton.com/resource-download.jsp?tp...D=SW1820200909165814
После запуска включите Контроллер и подключите устройство к компьютеру по Micro-USB порту. Операционная система обнаружит новое устройство и предложит установить для него драйвер:
После завершения установки контроллер должен появиться в Диспетчере устройств как USB-device.
После того как драйвер установлен, подключите Устройство к компьютеру по COM-порту (RS232) напрямую, либо используя USB-COM адаптер. Также есть возможность первичного подключения при помощи USB/UART адаптеров - на плату выведены RX/TX/GND каналы отладочного UART0 в виде гнезд для подключения 3-PIN интерфейса.
В диспетчере устройств должен отобразиться активный COM-порт:
Настроим связь с Контроллером через Терминальную программу (В нашем случае используется SecureCRT, но вы можете воспользоваться любым другим удобным аналогом):
(рис. 5)
Перезагрузите Контроллер (Кнопка сброса на плате имеет маркировку SW1)
После перезагрузки в окне Терминала должно появиться инициализационное сообщение (см. рис. 6)
(рис. 6)
Теперь контроллер подключен к ПК и готов к загрузке подготовленных нами ранее образов загрузчика, ядра и файловой системы.
Последнее редактирование: 3 года 4 мес. назад пользователем AEfimov.
- Форум
- Микроконтроллеры и Системы на Модуле (SOM)
- Микроконтроллеры Nuvoton на ядре ARM9
- NUC98R
- NUC98R. Установка драйвера USB. Настройка связи по COM/UART.
Время создания страницы: 0.035 секунд
